

4.38 Automatiserte kjøretøy
Det pågår omfattende forskning og utvikling med sikte på å utvikle automatiserte kjøretøy. Det er mer sannsynlig at automatiserte biler vil bli sikrere enn førerstyrte biler enn at de ikke vil bli det. Bl.a. vil et automatisert kjøretøy overholde alle trafikkregler, aldri bli trøtt, og aldri kjøre under påvirkning av alkohol eller andre rusmidler. Anslag på mulig nedgang i antall ulykker spenner fra 50% til 90%. Det er lite trolig at en så stor nedgang i antall ulykker som 90% kan oppnås. Automatiserte kjøretøy kan også forkorte reisetiden og redusere avgassutslipp. Automatiserte kjøretøy ventes å bli dyrere enn dagens biler, men det ventes at prisene vil gå ned etter hvert som automatiserte kjøretøy masseproduseres. Det er uklart når automatiserte kjøretøy kan bli tatt i bruk i vanlig trafikk. Innføring av automatiserte kjøretøy i stor skala krever omfattende internasjonalt samarbeid om spesifikasjon av bilenes funksjoner, testing av deres sikkerhet og definisjon av rettslig ansvar ved ulykker, samt tilrettelegging av veger med bl.a. oppmerking, skilt, kabler, internettdekning mv.
Problem og formål
Mennesket er en meget pålitelig operatør av motorkjøretøy. Ulykker eller uventede hendelser forekommer sjelden. De trolig mest fullstendige opplysninger om hyppigheten av ulykker kommer fra en naturalistisk føreratferdsstudie i USA (Dingus et al., 2016). Førere som kjørte instrumenterte biler som registrerte alle ulykker var innblandet i 905 ulykker i løpet av 56 millioner kjørte kilometer. Det gir en ulykkesrisiko på 16,1 per million kjørte kilometer. Som ulykker regnet man hendelser der kollisjonsputer ble utløst, hendelser der politiet ble tilkalt eller der det var fysisk sammenstøt med andre kjøretøy, trafikanter eller gjenstander. Til sammenligning er norske bilister i gjennomsnitt innblandet i 10,3 forsikringsmeldte uhell per million kjørte kilometer (Bjørnskau, 2020).
En ulykkesrisiko på 16,1 per million kilometer betyr at sannsynligheten for at en tilfeldig valgt kilometer er ulykkesfri er 0,999984. Sannsynligheten for å unngå personskade eller dødsfall er enda høyere. Ikke desto mindre velger mange førere av motorkjøretøy å utsette seg for unødvendig risiko, eksempelvis ved å bryte fartsgrenser, kjøre under påvirkning av alkohol, medikamenter eller narkotika, eller kjøre når de er trøtte eller uopplagte. Utilsiktede feilhandlinger som å overse noe, eller feilbedømme tid eller avstand, er også vanlige. Mange lar seg distrahere under kjøring. Vanlige aktiviteter som ikke har noe med kjøringen å gjøre er betjening av mobiltelefon, samhandling med passasjerer, leting etter noe og spising og drikking (Dingus et al., 2016). Dersom førere ikke tok unødvendig risiko, aldri begikk feil eller lot seg distrahere, ville ulykkesrisikoen være lavere enn den er nå.
Blant formålene med automatiserte kjøretøy er å redusere antall ulykker ved å eliminere den risiko for ulykker som kan knyttes til unødvendig risikotaking, menneskelige feilhandlinger og menneskelig uoppmerksomhet og distraksjon. Andre formål kan bl.a. være bedre trafikkavvikling, bedre transportnytte og økt miljøvennlighet.
Beskrivelse av tiltaket
Teknologi som gjør det mulig å fremføre en bil på offentlig veg uten at en fører betjener bilen er en videreføring av avanserte førerstøttesystemer. Society of Automotive Engineers (SAE) i USA har utviklet en mye brukt klassifikasjon av nivåer for automatisering av kjøretøy (tabell 4.38.1).
De fleste nye biler som selges i dag, befinner seg på nivå 1 eller 2 med hensyn til automatisering. I California, USA, kan selvkjørende biler kjøre på offentlige veger. Disse bilene er på automatiseringsnivå 3, det vil si at en fører må overta når automatikken svikter, eller når føreren selv velger å overta kontrollen over bilen.
Såkalte selvkjørende minibusser finnes i mange byer, blant dem Oslo. Disse bussene er det mest nærliggende å plassere på nivå 4 for automatisering, men de trenger fritak for en rekke grunnleggende tekniske krav for kjøretøy og kan kun kjøre på strekninger hvor det er gjort omfattende trafikktekniske tilpasninger. Det finnes en operatør om bord i bussen som kan overta kjøringen i situasjoner hvor automatikken svikter.
Det finnes per i dag (november 2020) ennå ikke eksempler på biler på automatiseringsnivå 5 som kjører i vanlig trafikk. Det er ikke helt klart om biler på dette automatiseringsnivået vil ha mulighet til å bli betjent av en fører, eller om det ikke legges opp til dette. Bilene må uansett ha en nødfunksjon som trer i kraft dersom automatikken svikter eller blir utsatt for cyberangrep.
Automatisering av mopeder eller motorsykler synes per i dag ikke aktuelt og det er ikke funnet studier om dette.
Tabell 4.38.1: Nivåer for automatisering av kjøretøy (basert på SAE; Wang et al., 2020)
| Nivå for automatisering | Beskrivelse av hvordan kjøretøyet fremføres |
| 0 Fullstendig manuelt | En fører betjener alle funksjoner; det finnes ingen førerstøttesystemer. |
| 1 Førerstøttesystemer finnes | En fører kjører bilen, men enkelte funksjoner kan være helt eller delvis automatisert. Eksempler: automatgir, automatisk kjørelys, elektronisk stabilitetskontroll, parkeringsassistent. |
| 2 Delvis automatisering | En fører kjører bilen, men noen funksjoner kan være automatisert. Eksempler: automatisk avstandsregulering til forankjørende bil (adaptiv cruisekontroll) OG automatisk kontroll av plassering i kjørefelt. |
| 3 Betinget automatisering | Bilen er selvkjørende under gitte betingelser, men en fører må være til stede og klar til å overta kontroll over bilen dersom systemet gir beskjed om det. |
| 4 Høy automatisering | Bilen er selvkjørende under gitte betingelser, for eksempel på visse vegtyper eller under visse vær- og føreforhold. Når betingelsene for automatisk kjøring ikke er oppfylt, stanser bilen eller kan be en fører om å overta kontrollen. |
| 5 Fullstendig automatisering | Bilen er selvkjørende alle steder og under alle forhold. Ved teknisk feil stanser bilen. Det er ikke nødvendig at bilen skal kunne betjenes av en fører. |
Automatisering av en bil oppnås ved å utstyre bilen med sensorer som registrerer objekter eller prosesser, samt tilpasninger av infrastruktur. Slike sensorer i kjøretøy har eksistert lenge (f.eks. kameraer som registrerer kjørefeltlinjer og sensorer som registrerer rotasjonshastigheten til hjulene). Sensorer som støtter automatisering kan eksempelvis være basert på vanlige kameraer, varmesøkende kameraer, infrarødt lys, radar eller lidar. Lidar (Light detection and ranging) har inntil nylig vært meget kostbart, men kostnadene er nå fallende. Lidar er den teknologi som minner mest om hvordan et menneskelig øye oppfatter omgivelsene men har begrensninger, bl.a. når det gjelder gjenkjennelse av objekter og funksjonalitet i dårlig vær.
Sensorene kobles til en kjørecomputer som programmeres til å reagere på det sensorene registrerer. For full automatisering kreves meget omfattende programmering. Programmeringsfeil kan derfor bli en risikofaktor (International Transport Forum, 2018). Fullt automatiserte biler vil regelmessig oppdatere sine programmer ved å laste ned oppdateringer fra et virtuelt nett.
Automatiserte kjøretøy kan bli utstyrt med maskinlæring, men dette er så langt ikke vedtatt. Det er en perfekt hukommelse. Et automatisert kjøretøy som første gang kjører på en veg, registrerer og lagrer alle relevante data om vegen. Neste gang bilen skal kjøre den samme vegen, kan den vegen «utenat», det vil si, vet alt om dens linjeføring, vegdekke, fartsgrense, og så videre.
I tillegg til full automatisering av hver bil, vil et trafikksystem der et stort antall automatiserte kjøretøy skal ferdes ha systemer for kommunikasjon mellom bilene og mellom dem og vegen eller en trafikksentral. Dette betegnes ofte som konnektivitet (connectivity). Konnektivitet kan i prinsippet utvikles uavhengig av (full) automatisering. Biler med avansert cruisekontroll kan eksempelvis «koble seg på hverandre» og kjøre med korte tidsluker (platooning).
Det pågår omfattende forskning og utvikling med sikte på å utvikle automatisert kjøretøy. Det er likevel vanskelig å si når slike biler vil bli så godt utviklet at de tillates brukt i vanlig trafikk. Det gjenstår mye utviklingsarbeid for å finne gode løsninger på problemer som samhandling mellom automatisert kjøretøy og andre trafikanter, særlig fotgjengere og syklister, og tilpasning til varierende friksjon og siktforhold (Elvik et al., 2020).
Virkning på ulykkene
Erfaringer i California
Fra 2014 har «selvkjørende biler» hatt tillatelse til å ferdes på offentlig veg i California, USA. Ifølge den siste studien av erfaringer med disse bilene (Wang et al., 2020) hadde de ved utgangen av 2018 tilbakelagt nær 6 millioner kjøretøykilometer. 128 ulykker var registrert. Det tilsvarer 21,5 ulykker per million kjøretøykilometer. Denne ulykkesrisikoen er høyere enn den gjennomsnittlige ulykkesrisikoen som ble funnet i den naturalistisk føreratferdsstudien i forskningsprogrammet SHRP-2 (Strategic Highway Research Program – phase 2), som var 16,1 ulykker per million kjøretøykilometer (Dingus et al., 2016)
Ulykkesrisikoen varierer imidlertid betydelig både mellom ulike operatører av selvkjørende biler og mellom ulike grupper av førere. De selvkjørende bilene med lavest risiko har lavere ulykkesrisiko enn en gjennomsnittlig bilfører (Boggs et al., 2020), mens de sikreste førere har lavere ulykkesrisiko enn gjennomsnittlig risiko for selvkjørende biler (Antin et al., 2017).
Operatører som har omfattende erfaring med selvkjørende biler, spesielt Google, har lavere ulykkesrisiko enn nybegynnere. Dette tyder på at risikoen for selvkjørende biler synker med økende erfaring, omtrent på samme måte som føreres ulykkesrisiko. Teknologien må foreløpig betraktes som eksperimentell og på et tidlig utviklingstrinn. Det fremgår av at førere har overtatt kontrollen i gjennomsnitt 0,027 ganger per kjørt kilometer (Wang et al., 2020). Det betyr at bilene i gjennomsnitt bare kjører litt over 37 kilometer i selvkjørende modus mellom hver gang føreren griper inn. Men også her er det stor variasjon mellom ulike operatører av selvkjørende biler.
Mikrosimulering av trafikk
Den vanligste måten å studere mulige virkninger av automatiserte kjøretøy på, er mikrosimulering av trafikk. Ved mikrosimulering kan man spesifisere den enkelte bils funksjonalitet, eksempelvis i form av akselerasjon, retardasjon, minste akseptable tidsluke til forankjørende, minste svingradius, og så videre. Ved å spesifisere slike funksjoner, kan man definere hvordan et automatisert kjøretøy kan tenkes å fungere. Deretter kan man simulere trafikk med varierende andel automatiserte kjøretøy.
Som indikator på trafikksikkerhet brukes som oftest konflikter. En konflikt er en trafikksituasjon der to kjøretøy eller trafikanter er på kollisjonskurs og vil kollidere dersom ingen av dem endrer fart eller retning innen en viss tid. Tiden kjøretøyene har til å endre fart eller retning kalles «tid-til-kollisjon» (time-to-collision). En konflikt defineres i mange studier som at tid til kollisjon er 1,5 sekunder eller mindre.
Konflikter i et trafikksystem med en blanding av automatiserte og førerstyrte biler, eller i et trafikksystem der alle biler er automatiserte, kan eksempelvis oppstå ved bremsing, ved feltskifte, ved samhandling med fotgjengere eller ved svingebevegelser i kryss. En skulle kanskje tro at konflikter helt kunne unngås i et system der alle biler er automatiserte. Men også i et slikt trafikksystem vil kjøretøyene ha ulik masse og dermed ulik bremseevne og stopplengde. Det er også tenkelig at ulike bilprodusenter programmerer bilene ulikt, slik at ulike bilmerker ikke innretter seg etter de samme sikkerhetsmarginer. Det sistnevnte problemet kan løses ved internasjonal standardisering, men i dag er problemet at bilprodusentene ikke offentliggjør hvordan automatisert kjøretøy vil bli programmert. Forskere som utfører mikrosimulering er dermed henvist til å gjette hvordan bilprodusentene vil programmere bilene.
Det har vist seg at resultatene av mikrosimulering er svært følsomme for de valg forskeren gjør med hensyn til parametere som akselerasjon, retardasjon, tidsluker, svingradius, og så videre. Siden det ikke finnes et sett av allment aksepterte verdier for disse parameterne, må resultatene av mikrosimulering betraktes som høyst usikre og spekulative. Forskerens spesifikasjon av parameterverdier bestemmer langt på veg resultatene.
Det gir likevel informasjon å sammenstille og sammenligne resultater av ulike simuleringsstudier. En slik sammenstilling viser, om ikke annet, den spennvidden i resultater som fremkommer som et resultat av de spesifikasjoner ulike forskere har valgt. Dette indikerer graden av enighet om hvordan automatisert kjøretøy kan tenkes å fungere. Enighet blant forskere betyr imidlertid ikke nødvendigvis at resultatene gir gode prediksjoner av mulige virkninger av automatisert kjøretøy. Forskere kan komme til enighet ved å sitere hverandre og møtes på konferanser; det kan likevel hende at de bommer grovt hvis bilprodusentene programmerer bilene annerledes enn forskerne har tenkt seg.
Disse forbeholdene må ikke glemmes når de viktigste resultater av simuleringsstudier presenteres her.
Motorveger regnes som den typen trafikkmiljø der automatiserte kjøretøy enklest kan tas i bruk. Motorveger har ikke fotgjengere eller syklister, som regel ikke saktegående motorkjøretøy, ukomplisert linjeføring og kan lett utstyres med teknologi som kan kommunisere med biler. Det er gjort en rekke simuleringsstudier av hvordan økt utbredelse av automatisert kjøretøy kan påvirke antall konflikter ved feltskifte og opphenting av forankjørende. Resultatene som presenteres nedenfor bygger på følgende studier: Kockelman et al. (2016), Olia et al. (2016), Li et al. (2017), Rahman et al. (2018), Yang et al. (2018), Papadoulis et al. (2019) og Rahman et al. (2019).
Figur 4.38.1 viser resultatene av studiene. Hvert punkt viser et resultat. Det er stor variasjon i resultatene. Når automatiserte kjøretøy har nådd 100% markedsandel, finner de fleste studier at antall konflikter ved feltskifte og opphenting vil bli sterkt redusert. Det er en opphopning av resultater som antyder mer enn 90% reduksjon av antall konflikter, mens noen resultater viser en betydelig mindre reduksjon av antall konflikter.
For å vise hovedtendensen i resultatene, er kurver føyd til datapunktene. Den heltrukne kurven gir best tilpasning til datapunktene. Den er et annengradspolynom. Kurver med samme matematiske form (annengradspolynom) er føyd for å vise øvre og nedre grense for resultatene. Selv om enkelte datapunkter ligger utenfor disse kurvene, fanger de opp det meste av spennvidden i resultater.
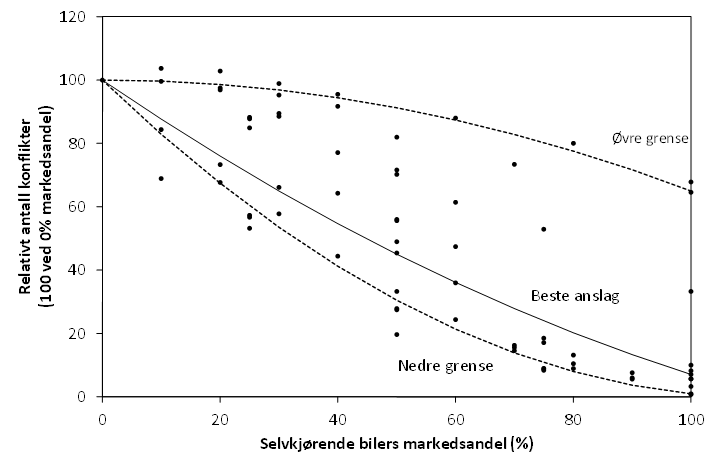
Figur 4.38.1: Endringer i simulerte konflikter ved feltskifte og opphenting av forankjørende på motorveg som funksjon av andel biler som er automatiserte og kurver føyd til resultatene.
Kurver av tilsvarende type er føyd til resultater av simuleringsstudier med hensyn til ulykker i kryss og ulykker med fotgjengere og syklister. Studiene som ligger til grunn for kurvene er gjort av Kockelman et al. (2016, 2018), Combs et al. (2018), Morando et al. (2018), Kovaceva et al. (2019) og Virdi et al. (2019). I noen tilfeller foreligger få resultater. Resultatene er derfor slått sammen til tre grupper:
- Feltskifte og opphenting på motorveger (se figur 4.38.1)
- Konflikter i kryss (veid gjennomsnitt av rundkjøringer, signalregulerte og vikepliktregulerte kryss)
- Konflikter med fotgjengere og syklister.
Tabell 4.38.2 viser predikert endring i antall konflikter ved 100% markedsandel for automatiserte kjøretøy.
Tabell 4.38.2: Predikert endring i antall konflikter ved 100% markedsandel for automatiserte biler. Basert på mikrosimulering.
| Prosent endring av antall konflikter | |||
| Konflikttype | Nedre grense | Beste anslag | Øvre grense |
| Feltskifte og opphenting | -99 | -93 | -35 |
| Kryss | -83 | -45 | -28 |
| Fotgjenger eller syklist | -63 | -57 | -53 |
For feltskifte og opphenting samt konflikter i kryss viser kurver føyd til resultatene at antall konflikter kan øke når automatiserte kjøretøy har en lav markedsandel, omkring 10-30%. For konflikter med fotgjengere og syklister viser resultatene nedgang for alle markedsandeler for automatisert kjøretøy mellom 0 og 100%. Det er få resultater som gjelder fotgjengere og syklister og usikkerheten i resultater er trolig undervurdert. Usikkerheten i resultater kan ikke tolkes som en statistisk usikkerhet. Den er snarere et uttrykk for at ulike forskere har spesifisert ulike parameterverdier for automatisert kjøretøys funksjonalitet.
Atferdstilpasning og alternative tilnærmingsmåter
Det finnes lite forskning om hvordan automatiserte og førerstyrte biler kan tenkes å samhandle med hverandre i et trafikksystem der det er en blanding av automatiserte og førerstyrte biler. Mikrosimuleringene som er presentert over har ikke studert samhandling eller gjensidig tilpasning av atferd mellom automatiserte og førerstyrte biler. I disse studiene er atferden «konstant», det vil si at den er fullstendig spesifisert gjennom de parameterverdier som er fastsatt for akselerasjon, retardasjon, tidsluker, og så videre. Det eneste som varierer er andelen automatiserte biler i et system.
Dette er trolig lite realistisk. Det er muligens realistisk at automatiserte biler kan styres etter faste parametere. Men førere kan tenkes å imitere de automatiserte bilene. Gouy et al. (2014) studerte endring i tidsluker i en kjøresimulatorstudie. I den første forsøksbetingelsen valgte førerne selv tidsluke. Gjennomsnittlig tidsluke var da 3,3-3,4 sekunder. I neste fase ble en kolonne av automatiserte biler med tidsluke 1,4 sekunder plassert i venstre kjørefelt (den simulerte vegen var en firefelts motorveg). Førerne reduserte da sin gjennomsnittlige tidsluke til 1,99 sekunder. I tredje forsøksbetingelse kjørte de automatiserte bilene med en tidsluke på 0,3 sekunder. Førerne i feltet ved siden av reduserte da sin gjennomsnittlige tidsluke til 1,87 sekunder.
Rahmati et al. (2019) fant i en simulatorstudie at førere holdt kortere tidsluke til automatiserte biler enn til førerstyrte biler.
Disse studiene viser at man ikke kan utelukke at førere vil tilpasse sin atferd til automatiserte biler på en måte som reduserer sikkerhetsmarginene. Atferdstilpasning blant fotgjengere og syklister kan også tenkes, siden mange vil oppdage at automatiserte biler reagerer raskere og bremser fortere enn førerstyrte biler.
Liu et al. (2020) førte tankegangen videre ved å anta at også automatiserte biler tilpasser sin atferd til førerstyrte biler, ikke bare styres etter faste parametere. Parameterne kan gjøres dynamiske og variere etter trafikksituasjonen. De modellerte «optimal» atferd, det vil si den atferd som minimerte summen av tidskostnader og ulykkeskostnader. Det viste seg da at automatiserte biler langt på veg måtte ha samme atferd som førerstyrte biler. Det var ikke mulig å ha så korte tidsluker som mange mikrosimuleringer har forutsatt og gevinsten både for reisetid og ulykker var langt mindre enn mange mikrosimuleringer har vist. Dessverre er denne studien foreløpig den eneste i sitt slag, så det er ikke mulig å vite hvor representative resultatene er.
Epidemiologiske betraktninger
Naturalistiske føreratferdsstudier (Dingus et al., 2016) har gjort det mulig å beregne hvordan en lang rekke handlinger hos førere øker ulykkesrisikoen. Dingus et al. (2016) har beregnet risikoen ved 36 ulike handlinger førere utførte under kjøring. Eksempler er betjening av radio eller klimaanlegg, tasting av nummer på mobiltelefon, kjøring mot vikepliktskilt, fartsovertredelser og manglende tegngiving. Det virker rimelig at alle disse handlingene kan elimineres, eller gjøres ufarlige, ved fullautomatisering av en bil. Forutsatt at de ulike handlingene ikke er korrelerte, kan eliminering av deres risikobidrag redusere ulykkene med 85%. Mange handlinger er korrelerte. Det betyr at potensiell nedgang i ulykker er mindre enn når handlingene ikke er korrelerte. Mulig ulykkesnedgang ved å eliminere fem ulike handlinger knyttet til mobiltelefon er 17,5% Mulig ulykkesnedgang ved å eliminere enhver håndtering av mobiltelefon (altså at de fem handlingene slås sammen til én: håndtering (av enhver form)) er 14,3%.
Potensiell nedgang i ulykker ved å eliminere de handlinger Dingus et al. (2016) har beregnet risiko for er derfor trolig omkring 70-80%, snarere enn 85%. Dette kan betraktes som den maksimalt tenkelige nedgang i ulykker som kan oppnås med automatiserte biler.
Nye kilder til risiko
Full automatisering av biler innfører to nye kilder til risiko, programmeringsfeil og cyberangrep.
Biler har i dag en kjørecomputer der mange førerstøttesystemer er programmert, slik som blokkeringsfrie bremser og elektronisk stabilitetskontroll. Full automatisering krever langt mer omfattende programmering. International Transport Forum (2018) nevner at det er vanlig med 20-50 feil per 1000 linjer programmeringstekst og at rutinesjekk bare oppdager omkring 15% av feilene. Fullt automatiserte biler krever programmer med flere millioner linjer med programmeringstekst.
Det er sannsynlig at første generasjons programmer vil inneholde feil, men det er også sannsynlig at feilene raskt vil bli oppdaget og rettet.
Fullt automatiserte biler vil ha konnektivitet. Det er i prinsippet mulig for hackere å komme seg inn i en bils program og legge inn skadelige feilfunksjoner i det (Elvik et al., 2020). På denne måten kan, for eksempel, fartskontrollen settes ut av funksjon. Ulykker kan bli resultatet av slike angrep. Risikoen for cyberangrep mot automatisert kjøretøy kan ikke tallfestes, men er reell.
Oppsummering av mulige virkninger på ulykker
Det er mer sannsynlig at fullt utviklede automatisert kjøretøy vil føre til færre trafikkulykker enn at de ikke vil føre til det. Dagens kunnskaper gjør det vanskelig å tallfeste virkningen på ulykker særlig presist. Simuleringsstudier antyder en mulig nedgang i ulykker, når konflikter brukes som indikator, på 50-90%. Studier av risiko knyttet til ulike feilhandlinger hos førere antyder en mulig ulykkesnedgang på 70-80%. Disse anslagene gjelder ulykker der automatisert kjøretøy er innblandet. Av flere grunner, kan nedgangen i det totale antall trafikkulykker bli mindre enn disse anslagene antyder.
- Fotgjengere, syklister, mopeder og motorsykler vil ikke bli automatiserte. Disse trafikantgruppene vil være utsatt for eneulykker og kollisjonsulykker seg imellom. Disse ulykkene kan utgjøre omkring 10% av dagens ulykkestall.
- Det er ikke sikkert at automatiserte biler vil oppnå 100% markedsandel. Studier av betalingsvillighet, se avsnittet om nyttekostnadsanalyser nedenfor, tyder på at omkring 30% aldri vil kjøpe en automatisert bil. Med mindre det blir påbudt med automatiserte biler, må man regne med at en viss andel førerstyrte biler fortsatt vil finnes.
- Det kan alltid skje ulykker som automatiserte biler ikke er programmert for å unngå. For eksempel kan en elg hoppe ut i vegen eller det kan rase ned en stor stein rett foran bilen. Slike hendelser vil forekomme, selv om de er sjeldne.
- Atferdstilpasning kan føre til mindre sikkerhetsmarginer og dermed en mindre nedgang i ulykkene.
- Utstrakt bruk av automatiserte biler kan føre til økt trafikk. Hovedgrunnen til det, er at automatisert kjøretøy kan ventes å redusere de generaliserte reisekostnader, dvs. summen av alle ulemper ved å reise, regnet i kroner. Dette fører erfaringsmessig til økt trafikk. Selv med en lavere ulykkesrisiko enn i dag, fører økt trafikk til flere ulykker enn man ville ha hatt uten trafikkøkningen.
- Det tilkommer nye risikofaktorer i form av feilprogrammering og risiko for cyberangrep og systemfeil.
Det er ikke mulig å tallfeste de virkninger disse seks forholdene kan ha på antall ulykker.
Forbud mot førerstyrte biler
Enkelte moralfilosofer (Sparrow & Howard, 2017; Müller & Gogoll, 2020) har tatt til orde for at kjøring med førerstyrte biler bør forbys når automatiserte biler er sikrere enn førerstyrte biler. Deres hovedargument er at førerstyrte biler da representerer en risiko som er unødvendig og som ingen derfor bør tillates å ta eller utsette andre for. De legger hovedvekt på den risiko en bilfører påfører andre trafikanter. Hvis denne risikoen er lavere for automatiserte biler, bør førerstyrte biler forbys.
Det er flere problemer med dette argumentet. For det første vil høyst sannsynlig også automatiserte biler påføre andre trafikanter enn dem som sitter i bilene en risiko. Dette er sannsynlig for det første fordi også automatiserte biler vil finnes i ulike dimensjoner. Selv uten en bilfører, vil godstransport ha stordriftsfordeler, slik at store og tunge godsbiler vil finnes. Disse påfører alle som er lettere enn dem selv risiko. For det andre er det per i dag ikke klart om automatiserte biler vil samhandle sikrere med fotgjengere og syklister enn førerstyrte biler gjør. For det tredje vil mopeder og motorsykler neppe bli automatisert. Skal førerstyrt bilkjøring forbys, må derfor også kjøring med moped eller motorsykkel forbys, ellers vil en del bilførere velge å bytte ut bilen med en motorsykkel, som har en høyere skaderisiko enn bil.
I dagens transportsystem godtar vi det som med rimelighet kan kalles unødvendig risiko. Vi tillater bruk av transportmidler som har en høyere risiko, både for brukerne selv og for andre trafikanter, enn de sikreste transportmidlene som finnes. Dersom unødvendig risiko var avgjørende, måtte all valgfrihet med hensyn både til transportmiddel, reiserute og reisetidspunkt avskaffes og alle måtte tvinges til å bruke det sikreste transportmiddel på den sikreste ruten på den sikreste tiden på døgnet. Dette er i ytterste konsekvens implikasjonen av et argument som vil forby det å ta, eller utsette andre for, unødvendig risiko.
Virkning på framkommelighet
Mikrosimuleringsstudier tyder på at automatisert kjøretøy kan utnytte vegkapasiteten mer effektivt enn førerstyrte biler. Dette betyr at flere biler kan passere et snitt av vegen per tidsenhet, eller at et gitt antall biler kan passere et snitt av vegen i høyere fart.
En oppsummering av resultater fra simuleringsstudier utført av Tientrakool et al. (2011), Fernandes og Nunes (2012), Shladover et al. (2012, Atkins (2016), Ye og Yamamoto (2018) og Shi, He og Huang (2019) viser en økning i kapasiteten til et kjørefelt på en motorveg på 114%. Usikkerheten er stor, med nedre grense på 40% økning av kapasitet og øvre grense på 275% økning av kapasitet.
Liu et al. (2020), som forutsetter at automatisert kjøretøy tilpasser atferden til førerstyrte biler, spesielt når det fremdeles finnes mange førerstyrte biler, kommer til langt mindre økning i kapasitet, 9-18%.
Endringer i kapasitet i kryss er av Atkins (2016) beregnet til 35% økning (nedre grense 26%; øvre grense 43%). Le Vine, Zolfaghari og Polak (2015) påpeker at passasjerer opplever endringer i fart eller retning som mer voldsomme enn førere. Dersom automatisert kjøretøy programmeres til å akselerere som tog, vil kapasiteten i kryss bli redusert.
Mulige endringer i reisetid med automatisert kjøretøy avhenger av to forhold. Det ene er hvor mye vegkapasiteten øker med automatisert kjøretøy. Det andre er hvor mye nyskapt trafikk økt vegkapasitet utløser. Simuleringsstudier utført av Atkins (2016) og Booz Allen Hamilton et al. (2018) tyder på at reisetiden kan forkortes med ca. 17% når alle biler er automatiserte. Dette gjelder under forutsetning om uendret trafikkmengde. Øker trafikken, vil reisetidsbesparelsen bli mindre.
Virkning på miljøforhold
Mulige virkninger av automatisert kjøretøy på miljøforhold avhenger sterkt av om bilene drives med forbrenningsmotor eller blir elektriske. Annema (2020) oppsummerer foreliggende studier ved å beregne livssyklusutslipp av karbondioksid (CO2) til automatisert kjøretøy med forbrenningsmotor og automatisert kjøretøy med elektrisk (batteridrevet) motor. Med livssyklusutslipp menes de totale utslipp i løpet av bilens levetid, herunder utslipp under produksjon av bilen, under bruk av den og ved skroting av den.
Utslippene fra en elektrisk automatisert bil ble beregnet å være 42% lavere enn fra en automatisert bil med forbrenningsmotor. For en liten elektrisk automatisert bil, var utslippene 7,1% lavere enn for en gjennomsnittlig automatisert bil. For en liten automatisert bil med forbrenningsmotor, var utslippene 8,8% lavere enn for en gjennomsnittlig automatisert bil med forbrenningsmotor.
Det er ikke klart om automatiserte biler vil bli basert på forbrenningsmotor eller elektrisk motor, men det sistnevnte virker mest sannsynlig.
Kostnader
Det antas at en automatisert bil vil bli dyrere enn dagens biler. Elvik (2020A) oppsummerer studier som har anslått merkostnadene. Det er ikke enighet om hvor mye dyrere en automatisert bil vil bli enn en førerstyrt bil, men de fleste anslag ligger mellom 10.000 US dollar og 40.000 US dollar per bil. Omregnet til norske kroner med kjøpekraftparitetskorrigert (= korrigert for forskjeller i prisnivå mellom Norge og USA) valutakurs mellom norske kroner og amerikanske dollar i 2019 blir dette mellom 99.300 og 397.200 kroner, som kan avrundes til mellom 100.000 og 400.000 kroner. Et anslag midt mellom disse ytterpunktene er 250.000 kroner.
Det kan antas at automatiserte biler, i likhet med dagens biler, vil bli tilbudt i ulike størrelser og prisklasser.
Nyttekostnadsvurderinger
Nytte og kostnader ved automatiserte biler avhenger av flere forhold. Det første er om det kan oppnås en full utskifting av bilparken fra førerstyrte til automatiserte biler. Dette avhenger av om automatiserte biler kan bli solgt i tilstrekkelig antall til de priser man i dag ser for seg at de vil ha. I tillegg vil økende automatiseringsgrad kreve tilrettelegging av infrastrukturen (bl.a. oppmerking, skilting, digital infrastruktur).
Elvik (2020A) har sammenfattet studier av betalingsvillighet for automatiserte biler. Disse studiene har undersøkt viljen til å betale den prisøkningen automatiserte biler antas å ha sammenlignet med førerstyrte biler. Sammenlagt viser resultatene at bare 1% av de spurte var villige til å betale 400.000 kroner ekstra for en automatisert bil. Om lag 5% var villige til å betale 250.000 kroner eller mer for en automatisert bil. Rundt regnet 30% av de spurte var ikke villige til å betale noe som helst for en automatisert bil. Dette kan muligens tolkes som at disse respondentene ikke under noen omstendigheter ønsker en automatisert bil, men vil beholde en førerstyrt bil.
Fagnant og Kockelman (2015) gjorde en nyttekostnadsanalyse av automatiserte biler i USA ved 10%, 50% og 90% markedsandel. De fant at nytten klart oversteg kostnadene ved alle disse markedsandelene. I nytten inngikk færre ulykker, spart reisetid, mindre drivstofforbruk (det ble forutsatt at automatiserte biler skulle ha forbrenningsmotor) og mindre kostnader til parkering. Merkostnaden ved å kjøpe en automatisert bil (omregnet til norske kroner) ble anslått til 100.000 kroner ved en markedsandel på 10%, 50.000 kroner ved en markedsandel på 50% og 30.000 kroner ved en markedsandel på 90%. Disse kostnadstallene er lavere enn de fleste som foreligger. Det synes likevel rimelig å anta at prisen på automatiserte biler vil falle etter hvert som de blir masseprodusert.
Fagnant og Kockelman (2015) antok at ulykkene ville bli redusert med 90% ved 90% markedsandel for automatiserte biler. På bakgrunn av de studier som er gjennomgått i dette kapitlet (se under Virkninger på ulykkene) virker dette optimistisk.
Elvik (2020B) har gjort et grovt overslag på mulige årlige nyttevirkninger av automatiserte biler i Oslo, basert på en antakelse om at dagens biltrafikk i Oslo er 2300 millioner kjøretøykilometer og at dette vil øke til 2900 millioner kjøretøykilometer hvis alle biler blir automatiserte. Beregningene viser at nytten i beste fall er omtrent like stor som kostnadene, men at den trolig er langt mindre. Per i dag må imidlertid enhver nyttekostnadsanalyse anses som spekulativ. Det er altfor mange kilder til usikkerhet til å trekke klare konklusjoner.
Et regnearkverktøy for nyttekostnadsanalyser er under utvikling i EU-prosjektet Levitate og vil foreligge i en første versjon våren 2021.
Formelt ansvar og saksgang
Initiativ til tiltaket
Det pågår en omfattende forskning og teknisk utvikling med sikte på å utvikle automatiserte biler. Det er i dag teknologiselskaper (for eksempel Google) og bilprodusenter som styrer denne utviklingen. Når automatiserte biler er godt nok utviklet til å lanseres på markedet, oppstår behov for flere reguleringstiltak. De viktigste er:
- Internasjonale standarder eller harmonisering av krav til parametere som definerer kjøreatferd (Statens vegvesen, 2020).
- Krav til sikkerhetstesting av automatiserte biler, inklusive sikkerhetstesting knyttet til cyberangrep.
- Lovregulering av rettslig ansvar for ulykker.
- Eventuelt nye bestemmelser om adgang til å kjøre førerstyrte biler.
Formelle krav og saksgang
Utviklingen av automatiserte biler er i dag ikke koordinert mellom ulike produsenter, men det pågår standardiseringsarbeid i EU. Myndighetenes krav til utvikling og produksjon av nye kjøretøy vil bli gitt i det internasjonale regelverket for typegodkjenning av kjøretøy gitt i EU-forordninger.
Det som vil bli lagt til grunn for framtidige lovgivning i Norge (og bortimot 60 andre land) er definisjonene og øvrig regelverk som utarbeides i UNECE/WP29 (Avtalen fra 1958 om tekniske krav til kjøretøy) og trafikkregler i UNECE/WP1 (Wienkonvensjonen om vegtrafikk) (UNECE, 2020). Det arbeideidet er basert på SAE J3016 som var de første standarden som definerte dette, men UNECE har brukt deler av den og lagt til andre momenter som blant annet type veg.
Når det gjelder kollisjonssikkerhet må automatiserte biler oppfylle de samme kravene som ellers sammenlignbare andre biler. Studier (Liu et al., 2019) viser at folk forventer at automatiserte biler er sikrere enn førerstyrte biler og ikke vil godta en forverring av sikkerheten.
Ansvar for gjennomføring av tiltaket
Det rettslige ansvaret for ulykker er i dag, som hovedregel, plassert hos føreren, men ved teknisk svikt er det produsenten som er ansvarlig. Når biler blir førerløse, må reglene om ansvar for ulykker endres. Selv om man går ut fra at automatiserte biler blir sikrere enn førerstyrte biler, vil ulykker fortsatt skje og skader må erstattes. Det er i dag ikke avklart hvem som skal ha ansvaret for ulykker der automatiserte biler er innblandet. En utvidelse av produktsikkerhetsansvaret tilsier at produsentene holdes ansvarlig for ulykker. Dette er imidlertid en regel som kan bli komplisert å utforme. Moderne bilproduksjon bygger på en høy grad av spesialisering og bruk av underleverandører. En bil av et gitt merke har deler som er produsert av mange underleverandører. En mulighet er at bilmerket (Ford, Volkswagen, etc.) har hovedansvaret og fordeler dette videre til underleverandører gjennom reassuranse (det vil si at bilmerket kan kreve at en utbetalt erstatning dekkes av en underleverandør, som i sin tur har forsikringsdekning for kravet).
For å regulere ansvar for ulykker, som reguleres i nasjonal lovgivning, må det foretas en gjennomgang av vegtrafikklovgivningen og øvrig relevant regelverk for å innføre permanente ordninger med selvkjørende kjøretøy blant annet for å avklare forhold rundt straffansvar og erstatningsansvar. Ifølge den internasjonale konvensjonen om vegtrafikk (Wien-konvensjonen) er Norge er forpliktet til å utforme vegtrafikklovgivningen i samsvar med konvensjonen. Wien-konvensjonen stiller en rekke krav til fører og kjøretøy. Kravet om at ethvert kjøretøy skal ha en fører og at føreren til enhver tid skal ha full kontroll over kjøretøyet, jf. artikkel 8 (1) og (5), ble ansett å være til hinder for å tillate kjøring med selvkjørende kjøretøy uten fører.
Referanser
Annema, J. A. 2020. Policy implications of the potential carbon dioxide (CO2) emission and energy impacts of highly automated vehicles. Advances in Transport Policy and Planning, 5, 149-162.
Antin, J. F., Guo, F., Fang, Y., Dingus, T. A., Perez, M. A., Hankey, J. M. 2017. A validation of the low mileage bias using naturalistic driving study data. Journal of Safety Research, 63, 115-120.
Atkins, 2016. Research on the impacts of connected and autonomous vehicles on traffic flow. Stage 2: Traffic modelling and analysis. Technical Report.
Bjørnskau, T. 2020. Risiko i veitrafikken 2017/18. Rapport 1782. Oslo, Transportøkonomisk institutt.
Boggs, A. M., Arvin, R., Khattak, A. J. 2020. Exploring the who, what, when, where, and why of automated vehicle disengagements. Accident Analysis and Prevention, 136, 105406.
Booz Allen Hamilton et al. 2018. Dedicating lanes for priority or exclusive use by connected and automated vehicles. NCHRP research report 891. Washington DC, Transportation Research Board.
Combs, T. S., Sandt, L. S., Clamann, M. P., McDonald, N. C. 2018. Automated vehicles and pedestrian safety: exploring the promise and limits of pedestrian detection. American Journal of Preventive Medicine. doi.org/10.1016/j.amepre.2018.06.024.
Dingus, T. A., Guo, F., Lee, S., Antin, J. F., Perez, M., Buchanan-King, M., Hankey, J. 2016. Driver crash risk factors and prevalence evaluation using naturalistic driving data. Proceedings of the National Academy of Sciences.
Elvik, R. 2020A. The demand for automated vehicles: A synthesis of willingness-to-pay surveys. Economics of Transportation, 23, 100179.
Elvik, R. 2020B. Converting impacts of connected and automated vehicles to monetary terms. Deliverable D3.3 of the H2020 project Levitate.
Elvik, R., Meyer, S. F., Hu, B., Ralbovsky, M., Vorwagner, A., Boghani, H. 2020. Methods for forecasting the impacts of connected and automated vehicles. Deliverable D3.2 of the H2020 project Levitate.
Fagnant, D. J., Kockelman, K. 2015. Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations. Transportation Research Part A, 77, 167-181.
Fernandes, P., Nunes, U. 2012. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Transactions on Intelligent Transport Systems, 13, 91-106.
Gouy, M., Wiedemann, K., Stevens, A., Brunett, G., Reed, N. 2014. Driving next to automated vehicle platoons: How do short time headways influence non-platoon drivers’ longitudinal control? Transportation Research Part F, 264-273.
International Transport Forum. 2018. Safer roads with automated vehicles? Corporate Partnership Board Report. Paris, OECD publishing.
Kockelman, K., Bansal, P., et al. 2016. Implications of connected and automated vehicles on the safety and operations of roadway networks: a final report. CTR technical report 0-6849-1. The University of Texas at Austin.
Kockelman, K., Boyles, S. 2018. Smart transport for cities and nations. The rise of self-driving and connected vehicles. The University of Texas at Austin.
Kovaceva, J., et al. (14 authors). 2019. Assessment of the PROSPECT safety systems including socio-economic evaluation. Deliverable D2.3 of the PROSPECT project (proactive safety for pedestrians and cyclists). Gothenburg, Chalmers University of Technology.
Le Vine, S., Zolfaghari, A., Polak, J. 2015. Autonomous cars: The tension between occupant experience and intersection capacity. Transportation Research Part C, 52, 1-14.
Li, Y., Wang, H., Xing, L., Liu, S., Wei, X. 2017. Evaluation of the impacts of cooperative adaptive cruise control on reducing rear-end collision risks on freeways. Accident Analysis and Prevention, 98, 87-95.
Liu, P. , Yang, R., Xu, Z. 2019. Public acceptance of fully automated driving: Effects of social trust and risk/benefit perceptions. Risk Analysis, 39, 326-341.
Liu, X., Shen, D., Lai, L., Le Vine, S. 2020. Optimizing the safety-efficiency balancing of automated vehicle car-following. Accident Analysis and Prevention, 136, 105435.
Morando, M. M., Tian, Q., Truong, L. T., Vu, H. V. 2018. Studying the safety impact of autonomous vehicles using simulation-based surrigate safety measures. Journal of Advanced Transportation. doi.org/10.1155/2018/6135183.
Müller, J. F., Gogoll, J. 2020. Should manual driving be (eventually) outlawed? Science and Engineering Ethics.
Olia, A., Abdelgawad, H., Abdulhai, B., Razavi, S. N. 2016. Assessing potential impacts of connected vehicles: Mobility, environmental, and safety perspectives. Journal of Intelligent Transportation Systems, 20, 229-243.
Papadoulis, A., Quddus, M., Imprialou, M. 2019. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accident Analysis and Prevention, 124, 12-22.
Rahman, M. S., Abdel-Aty, M. 2018. Longitudinal safety evaluation of connected vehicles’ platooning on expressways, Accident Analysis and Prevention, 117, 381–391.
Rahman, M. S., Abdel-Aty, M., Lee, J., Rahman, M. H. 2019. Safety benefits of arterials’ crash risk under connected and automated vehicles. Transportation Research Part C, 100, 354-371.
Rahmati, Y., Hosseini, M. K., Talebpour, A., Swain, B., Nelson, C. 2019. Influence of autonomous vehicles on car-following behavior of human drivers. Transportation Research Record, 2673, 367-379.
Shi, Y., He, Q., Huang, Z. 2019. Capacity analysis and cooperative lane changing for connected and automated vehicles: entropy-based assessment method. Transportation Research Record, 2673, 485-498.
Shladover, S. E., Su, D., Lu, X.-Y. 2012. Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow, Transportation Research Record: Journal of the Transportation Research Board, 2324, 63–70.
Sparrow, R., Howard, M. 2017. When human beings are like drunk robots: Driverless vehicles, ethics, and the future of transport. Transportation Research Part C, 80, 206-215.
Tientrakool, P., Ho, Y-C., Maxemchuk, F. 2011. Highway capacity benefits from using vehicle-to-vehicle communication and sensors for collision avoidance. IEEE proceedings of Vehicular Technology Conference, San Francisco.
Virdi, N., Grzybowska, H., Waller, S. T., Dixit, V. 2019. A safety assessment of mixed fleets with connected and autonomous vehicles using the surrogate safety assessment module. Accident Analysis and Prevention, 131, 95-111.
Wang, J., Zhang, L., Huang, Y., Zhao, H. 2020. Safety of autonomous vehicles. Journal of Advanced Transportation, Article ID 8867757.
Yang, Z., Wang, X, Pei, X., Feng, S., Wong, S, C. 2018. Longitudinal safety analysis for heterogeneous platoon of automated and human vehicles. IEEE Transactions on Intelligent Transport Systems.
Ye, L., Yamamoto, T. 2018. Modelling connected and autonomous vehicles in heterogeneous traffic flow. Physica A, 490, 269-277.
UNECE (2020). Working Party on Automated/Autonomous and Connected Vehicles – Introduction. https://unece.org/transportvehicle-regulations/working-party-automatedautonomous-and-connected-vehicles-introduction
Statens vegvesen (2020). Vegkart for arbeid med standardisering av ITS. Statens vegvesens rapporter, nr. 698. Vegdirektoratet, Vegtransport.